


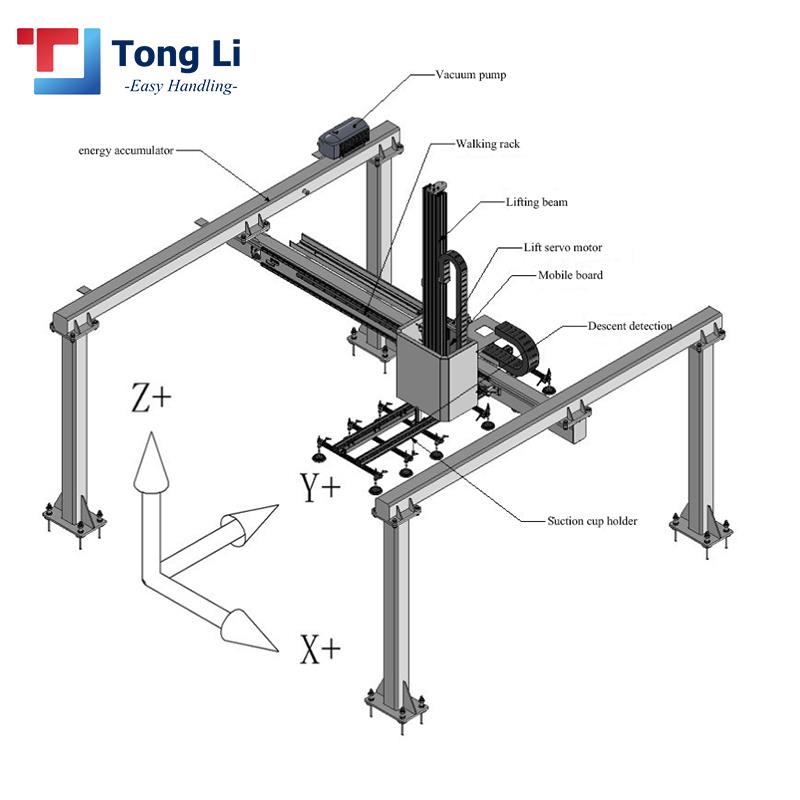
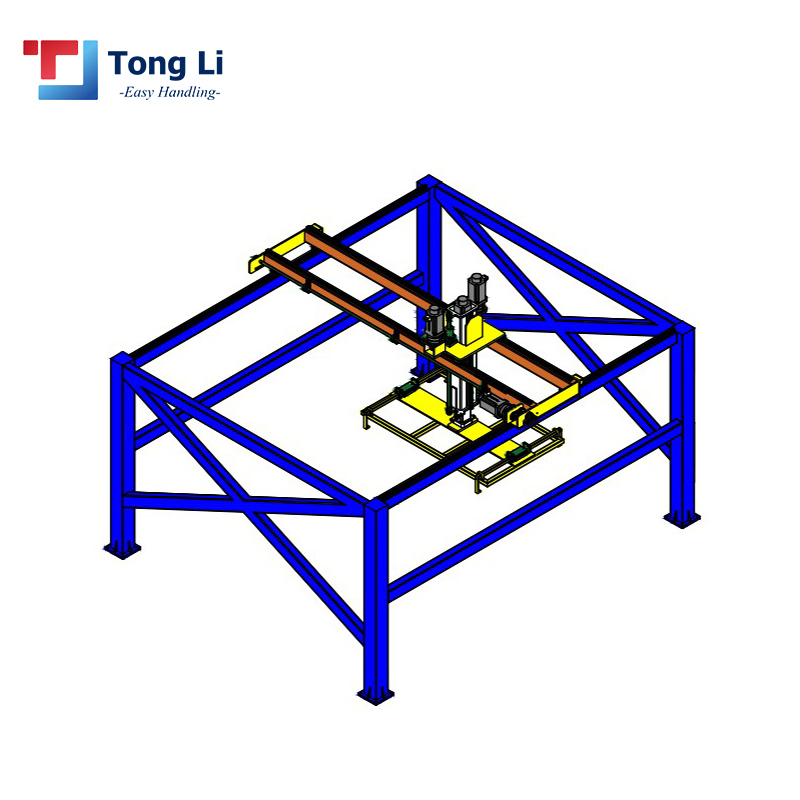
Robot de pórtico
El manipulador de celosía utiliza tecnología de procesamiento integrada, que es adecuada para la carga y descarga de máquinas herramienta y líneas de producción, rotación de piezas de trabajo, rotación de piezas de trabajo, etc. Al mismo tiempo, su sistema de herramientas de sujeción y posicionamiento de alta precisión proporciona una interfaz estándar para el procesamiento automático del robot, y la precisión de posicionamiento repetido garantiza alta precisión, alta eficiencia y consistencia de los productos por lotes.
El manipulador de celosía es una máquina que puede apilar automáticamente el material que se carga en un contenedor (como una caja de cartón, una bolsa tejida, un cubo, etc.) o un artículo regular empaquetado y sin empaquetar. Recoge los artículos uno por uno en un orden determinado y los organiza en un palé. En el proceso, los artículos se pueden apilar en múltiples capas y empujar hacia afuera, será conveniente pasar al siguiente paso de empaquetado y envío al almacén para su almacenamiento mediante carretilla elevadora. El manipulador de celosía realiza una gestión de operación inteligente, que puede reducir en gran medida la intensidad de mano de obra y proteger bien las mercancías al mismo tiempo. También tiene las siguientes funciones: prevención de polvo, a prueba de humedad, a prueba de sol, prevención de desgaste durante el transporte. Por lo tanto, es ampliamente utilizado en muchas empresas de producción como químicas, bebidas, alimentos, cerveza, plástico para apilar automáticamente varias formas de productos de embalaje como cartones, bolsas, latas, cajas de cerveza, botellas, etc.
1. Industria de autopartes
2. Industria alimentaria
3. Industria logística
4. Procesamiento y fabricación
5. Industria del tabaco y el alcohol
6. Industria de procesamiento de madera
7. Industria de procesamiento de máquinas herramienta
| Manipulador automático de cerchas | |||||
| Carga (kg) | 20 | 50 | 70 | 100 | 250 |
| Velocidad de línea | |||||
| Eje X (m/s) | 2.3 | 1.8 | 1.6 | 1.6 | 1.5 |
| Eje Y (m/s) | 2.3 | 1.8 | 1.6 | 1.6 | 1.5 |
| Eje Z (m/s) | 1.6 | 1.3 | 1.3 | 1.1 | 1.1 |
| Alcance del trabajo | |||||
| Eje X (mm) | 1500-45000 | 1500-45000 | 1500-45000 | 1500-45000 | 1500-45000 |
| Eje Y (mm) | 1500-8000 | 1500-8000 | 1500-8000 | 1500-8000 | 1500-8000 |
| Eje Z (mm) | 500-2000 | 500-2000 | 500-2000 | 500-2000 | 500-2000 |
| Precisión de posicionamiento repetido (mm) | ±0,03 | ±0,03 | ±0,05 | ±0,05 | ±0,07 |
| Sistema de lubricación | Lubricación concentrada o independiente | Lubricación concentrada o independiente | Lubricación concentrada o independiente | Lubricación concentrada o independiente | Lubricación concentrada o independiente |
| Velocidad acelerada (㎡/s) | 3 | 3 | 3 | 2.5 | 2 |


