




Manipulador con abrazadera
Introducción
a) El mismo manipulador asistido por brazo duro puede equilibrar diversos pesos desde 2 hasta 500 kg.
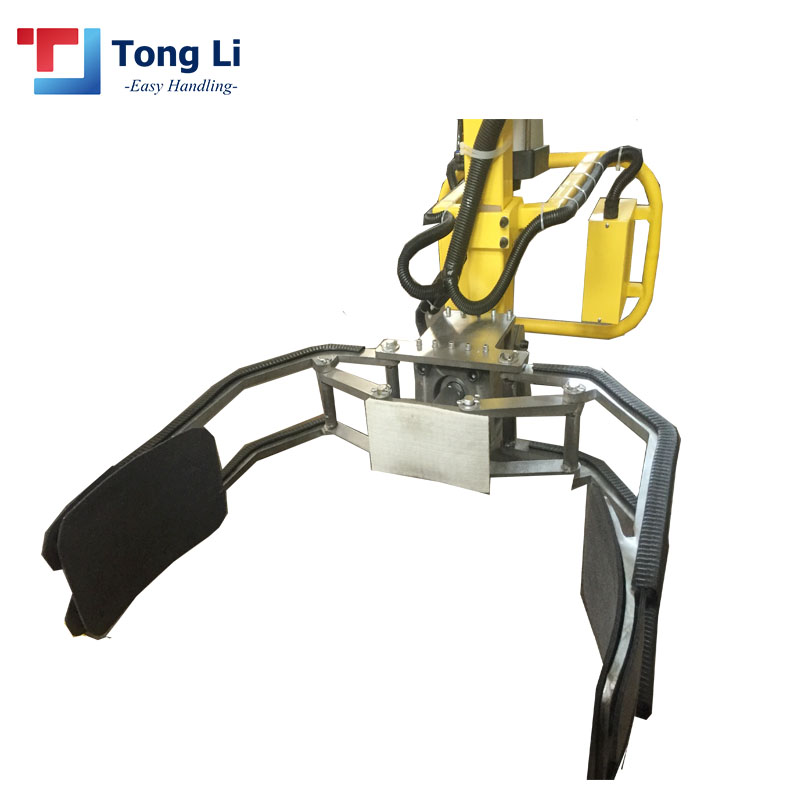
b) El manipulador asistido por potencia se compone de un soporte de equilibrio, un dispositivo de agarre y una estructura de instalación.
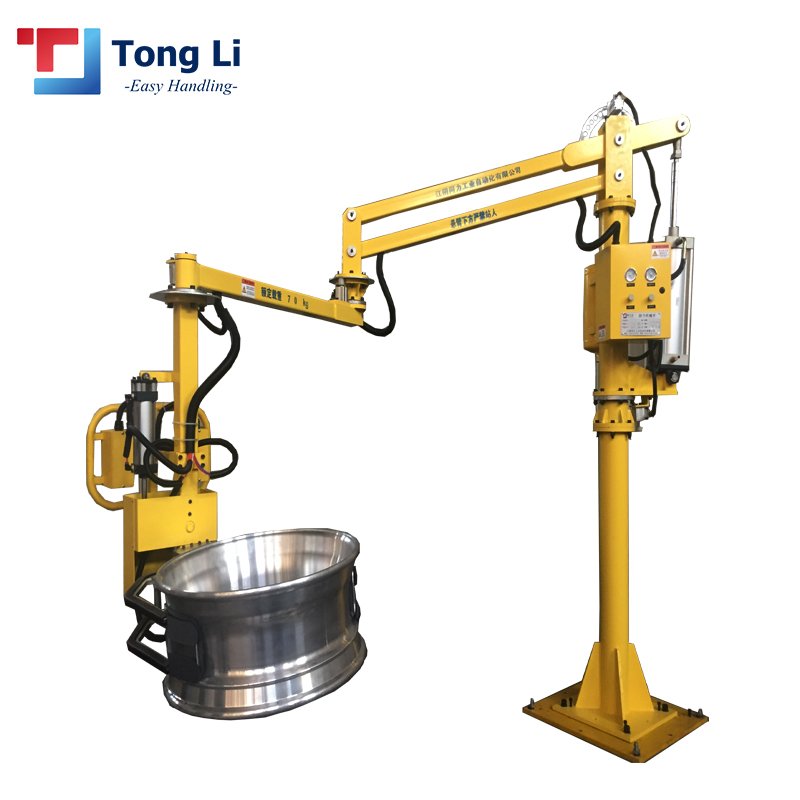
c) El manipulador host es el dispositivo principal que realiza el estado de flotación sin gravedad de los materiales (o piezas de trabajo) en el aire.
d) El manipulador es el dispositivo que realiza la toma de la pieza de trabajo y completa los requerimientos de manipulación y montaje correspondientes del usuario.
e) La estructura de instalación es un mecanismo que soporta todo el conjunto de equipos de acuerdo al área de servicio del usuario y las condiciones del sitio.

| Modelo de equipo | TLJXS-YB-50 | TLJXS-YB-100 | TLJXS-YB-200 | TLJXS-YB-300 |
| Capacidad | 50 kilos | 100 kilos | 200 kilos | 300 kilos |
| Radio de trabajo | 2500 mm | 2500 mm | 2500 mm | 2500 mm |
| Altura de elevación | 1500 mm | 1500 mm | 1500 mm | 1500 mm |
| Presión del aire | 0,5-0,8 MPa | 0,5-0,8 MPa | 0,5-0,8 MPa | 0,5-0,8 MPa |
| Ángulo de rotación A | 360° | 360° | 360° | 360° |
| Ángulo de rotación B | 300° | 300° | 300° | 300° |
| Ángulo de rotación C | 360° | 360° | 360° | 360° |






a) Puede realizar el estado de equilibrio gravitacional de materiales de diferentes pesos, lo que es adecuado para la operación de transferencia precisa de materiales.
b) Cuando no hay carga, carga completa y se procesan diferentes piezas de trabajo, el sistema puede detectar el cambio de peso y realizar el estado flotante de la carga en el espacio tridimensional, lo que es conveniente para un posicionamiento preciso.
c) Las características de equilibrio total, movimiento suave, etc., permiten al operador realizar fácilmente la manipulación, posicionamiento y montaje de la pieza de trabajo.
d) El brazo rígido puede hacer que el manipulador lleve la pieza de trabajo sobre obstáculos; el brazo horizontal puede cumplir con los requisitos de colocación horizontal y extracción horizontal de materiales en lugares relevantes.
e) El sistema puede mantener siempre el nivel de la cabeza del manipulador y ejercer una alta trabajabilidad.
f) Dispositivo de freno articulado, con múltiples articulaciones rotatorias para realizar la recogida y colocación de material en un área amplia; equipado con un dispositivo de freno, el operador puede interrumpir el movimiento del manipulador en cualquier momento durante la operación.



Este tipo de manipulador eléctrico puede levantar hasta 500 kg de piezas de trabajo. El radio de trabajo es de aproximadamente 2500 mm y la altura de elevación es de aproximadamente 1500 mm. Según el peso de la pieza de trabajo a levantar, se debe elegir el tipo de máquina más pequeño de acuerdo con el peso máximo de la pieza de trabajo. Si utilizamos la carga máxima de 200 kg de manipulador para transportar 30 kg de pieza de trabajo, entonces el rendimiento de la operación ciertamente no es bueno, se siente muy pesado. El equipo está equipado de serie con un tanque de almacenamiento de aire, que aún puede completar un ciclo de acción en caso de corte de gas. Al mismo tiempo, emitirá una alarma para recordarle al operador. Cuando la presión del aire cae a cierto punto, iniciará la función de autobloqueo para evitar la caída de la pieza de trabajo. Manipulador con sistema de seguridad, en el proceso de manipulación o la pieza de trabajo no se coloca en la estación segura, el operador no puede soltar la pieza de trabajo. Con una variedad de accesorios no estándar, el manipulador eléctrico de tipo brazo duro puede completar fácilmente una variedad de acciones del proceso.





